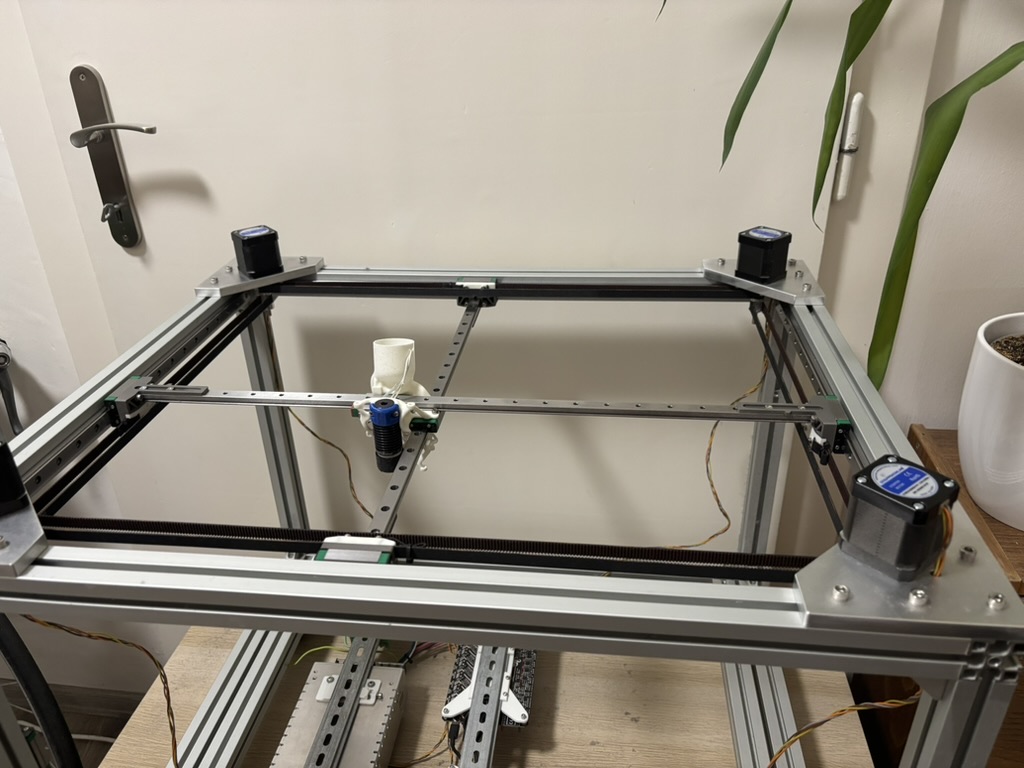
A custom-built crossed gantry 3D printer designed from scratch, using a frame from an old 3D printer as the starting point. Features dual motors for both X and Y axes, generative 3D modeling for optimized components, and integration of metal 3D-printed parts, with the Z-axis design currently in development.

I’m building an ultra-fast FPV drone with a strong emphasis on aerodynamics, combining off-the-shelf FPV components with fully custom 3D-printed parts that I designed from scratch. Every aspect of the build, from frame geometry to component placement, is carefully considered to minimize drag, and maximize speeed. This project is not only a way to refine my CAD design skills and experiment with advanced aerodynamic concepts, but also an opportunity to explore rapid prototyping, problem-solving, and iterative design while enjoying the creative process of bringing a high-performance drone from concept to reality.
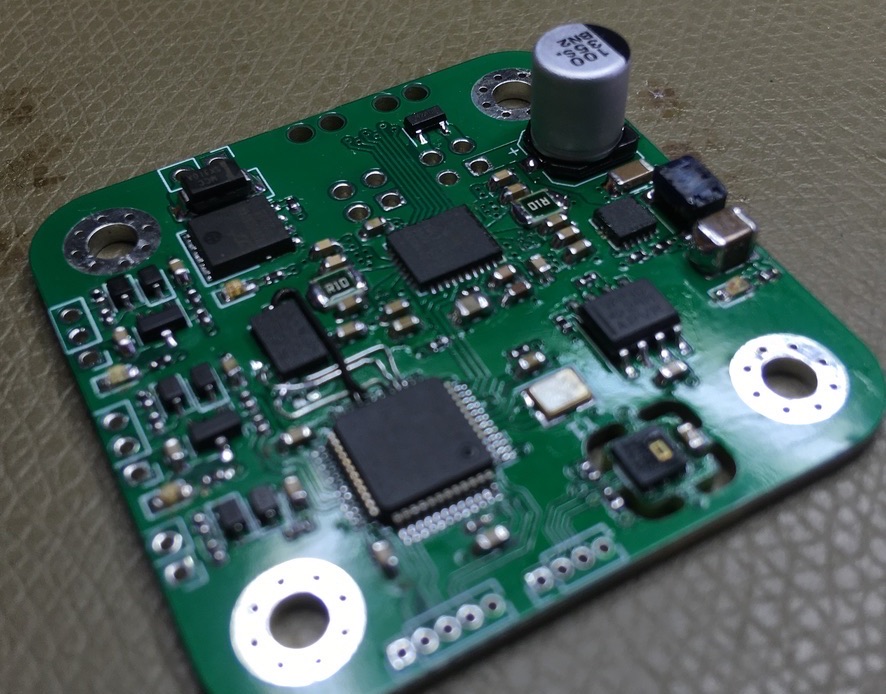
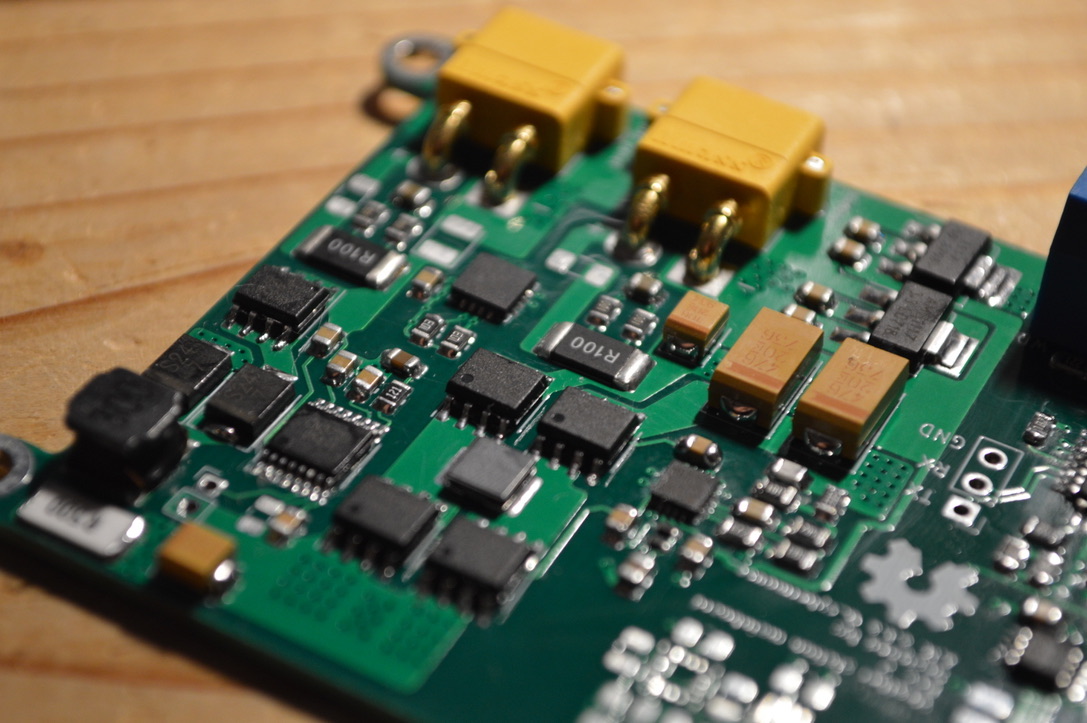
A custom 3D printer toolhead controller with integrated CAN bus for minimal wiring, featuring an STM32 microcontroller, onboard stepper driver, MOSFET-controlled hotend and fans, and multiple sensors including chamber temperature and an accelerometer for resonance calibration.
A custom-designed weather station buoy system designed for a sailing club I competed for, featuring a Raspberry Pi Zero LoRa gateway and buoy electronics featuring environmental sensing, and power management.